概要
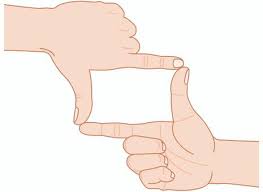
デスクトップ環境を利用する際,マウスなどの入力デバイスを用いたディスプレイモニタ上での範囲選択は必要不可欠です.同様にVR空間においても,一人称視点での効果的な範囲選択が必要になると考えられます.そこで本研究では,写真の構図を決める際に使われる指フレームというジェスチャ(図1)に注目し,ヘッドマウントディスプレイを通じてユーザが直観的に仮想空間上で範囲選択できる指ビューファインダー(Digitus Viewfinder)というシステムを提案します.
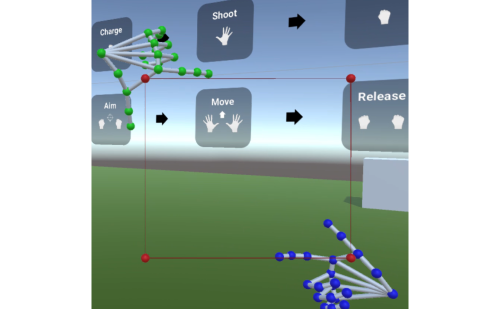
指ビューファインダーは,ハンドトラッキング技術によって認識されるユーザの手が指フレームを形作る際に,手の位置に合わせて矩形枠が生成され,リアルタイムな範囲選択が可能になるシステムです(図2).特定のデバイスを把持する必要がないため,本手法は多くのケースにおいて有用であると考えられています.
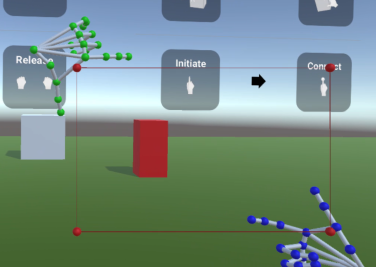
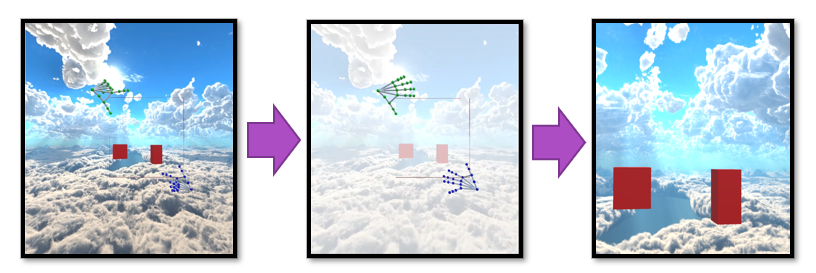
本研究では,指ビューファインダーを利用して,オブジェクトの複数選択,写真撮影,心理的拡大の三種類のアプリケーションを実装しています.オブジェクトの複数選択は,指ビューファインダーを利用してシーン内に存在する複数のオブジェクトを同時に操作できるアプリケーションであり(図3),写真撮影はユーザが指ビューファインダーを利用して任意の構図の写真を撮影するアプリケーションです(図4).そして心理的拡大は,ユーザが風景のなかで強調したい部分を指ビューファインダーに収めながら撮影することでユーザが心理的に感じた風景により近い景色を再現できるアプリケーションです.
指ビューファインダーとSAM(Smart Ambient Media)
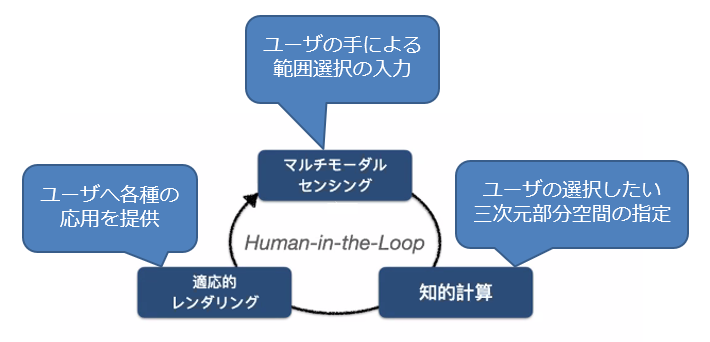
指ビューファインダーは,ユーザの手により範囲指定を入力して,ユーザの選択したい三次元部分空間を決定し,ユーザへ各種の応用を提供するという流れをもちます.つまりSAMのコアコンセプトであるHuman-in-the-Loopの構造をとるため,SAMに位置づけられています.
メンバ
藤代研究室に所属しているメンバは名前の前に藤代研のアイコン![]() がついています.
がついています.
| 名前 | 現在の所属 | ホームページ |
|---|---|---|
| 慶應義塾大学 | – |
業績
下線が引いてある著者は藤代研究室所属している/所属していたメンバです.
論文誌
- 星川 潤,藤代 一成:「DVF:スケールの個人差を考慮した仮想シーン知覚像の半自動現」,芸術科学会論文誌,22巻2号2:1-2:11頁,2023年6月15日
発表
査読あり
国際会議
- Jun Hoshikawa, Issei Fujishiro: “DVF:Toward Semiautomatic Composition of Perceptual Images of a Virtual Scene Through Hand Gesture Interface” (poster paper) in Proceedings of the 2022 International Conference on Cyberworlds 2022, September 2022, [doi: 10.1109/CW55638.2022.00040].
国内会議
- 星川 潤,藤代 一成:「DVF:ハンドジェスチャインタフェースを用いた仮想シーン知覚像のスケール再現に向けて」(ショート発表),Visual Computing 2022,国立京都国際会館,2022年10月4日―8日
査読なし
- 星川 潤,藤代 一成:「DVF:ハンドジェスチャインタフェースを用いた仮想シーン知覚像のスケール再現に向けて」,FIT2022 ラボツアー, 慶應義塾大学矢上キャンパス, 2022年9月14日―15日
- 星川 潤,藤代 一成:「指ビューファインダーを用いた仮想シーンの心理的拡大」,KEIO TECHNO-MALL 2021,フロア04 No.19,オンライン,2021年12月10日
- 星川 潤,藤代 一成:「指ビューファインダーと仮想シーンの心理的拡大」,第7回 ADADA Japan 学術大会,オンライン,2021年10月8日
- 星川 潤,藤代 一成:「指ビューファインダーとその応用可能性」,情報処理学会第83回全国大会講演論文集(4),pp. 77―78(6Y-05),オンライン,2021年3月18日―20日
資金
 挑戦的研究(開拓):20K20481 (2020―)
挑戦的研究(開拓):20K20481 (2020―)